Das Ziel dieser Architektur besteht darin verschiedene Verhaltensmuster tatsächlich parallel auszuführen. Mit diesem Verfahren wird es dem Roboter ermöglicht sich ohne Weltmodell in seiner Umwelt zurechtzufinden, damit wird erreicht dass er mit sehr wenig Speicher auskommt. Durch die Module wird eine schrittweise Erweiterung möglich. Weiters wird der Roboter nicht langsamer in seiner Verarbeitung wenn er "klüger" wird.
Der Roboter in diesem Beispiel soll folgendes können:
Als Ausstattung hat er folgende Sensoren zur Verfügung:
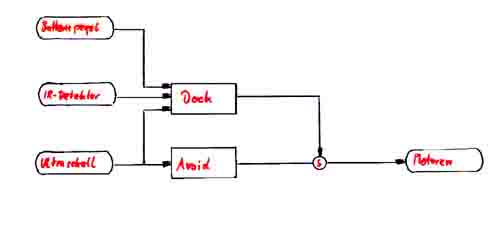
In der Abbildung steht Ultraschall für einen Softwaretreiber, der die Ultrschallsensoren bedient und dabei ständig die von ihnen gemessenen Abstände im Auge behält. Motoren ist ein Softwaretreiber, der entsprechend der Befehle, die er erhält, Strom an die Motoren schickt. Dazwischen befindet sich ein Modul namens Avoid, welches auf der Basis der Ultraschalldaten fortlaufend Befehle errechnet und an die Motoren sendet. Das Modul Avoid enthält den Code für ein einfaches Reflexverhalten. Wenn der vordere Ultraschallsensor einen zu geringen Abstandswert meldet, stoppt Avoid die Vorwärtsbewegung des Roboters. Wenn ein anderer Ultraschallsensor außer dem hinteren den kürzesten Abstand mißt, dreht der Roboter so lange, bis der hintere in Richtung des kürzesten Abstands weist. Wenn der hintere Ultraschallsensor den kürzesten Abstand mißt, bekommen die Motoren den Befehl, den Roboter vorwärts zu bewegen.
Das zweite Verhalten Dock dient dem Zweck den Roboter zu einer Ladestation zu bewegen, wenn die Batterien fast leer sind. In diesem Fall nimmt Dock eingabesignale von dern Ultraschallsensoren, dem Infrarotsystem und der Batterieanzeigedes Roboters entgegen. Die Ladestation ist durch einen kodierten Infrarotsender gekennzeichnet. Wenn Dock aktiviert ist, errechnet es Motorbefehle um den Roboter zu Ladestation zu bewegen und ihn dort andocken zu lassen, während er weiterhin allen Hindernissen mit Ausnahme der Ladestation ausweicht.
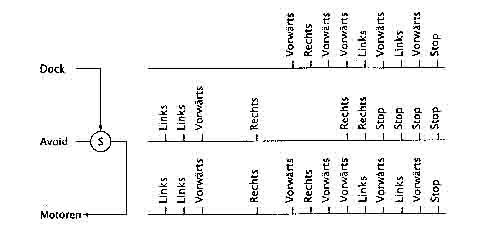
Diese Abbildung zeigt wie der Unterbrecherknoten S arbeitet.
Der Roboter in diesem Beispiel soll folgendes können:
Als Ausstattung hat er folgende Sensoren zur Verfügung:
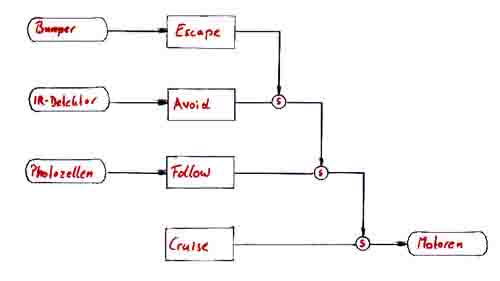
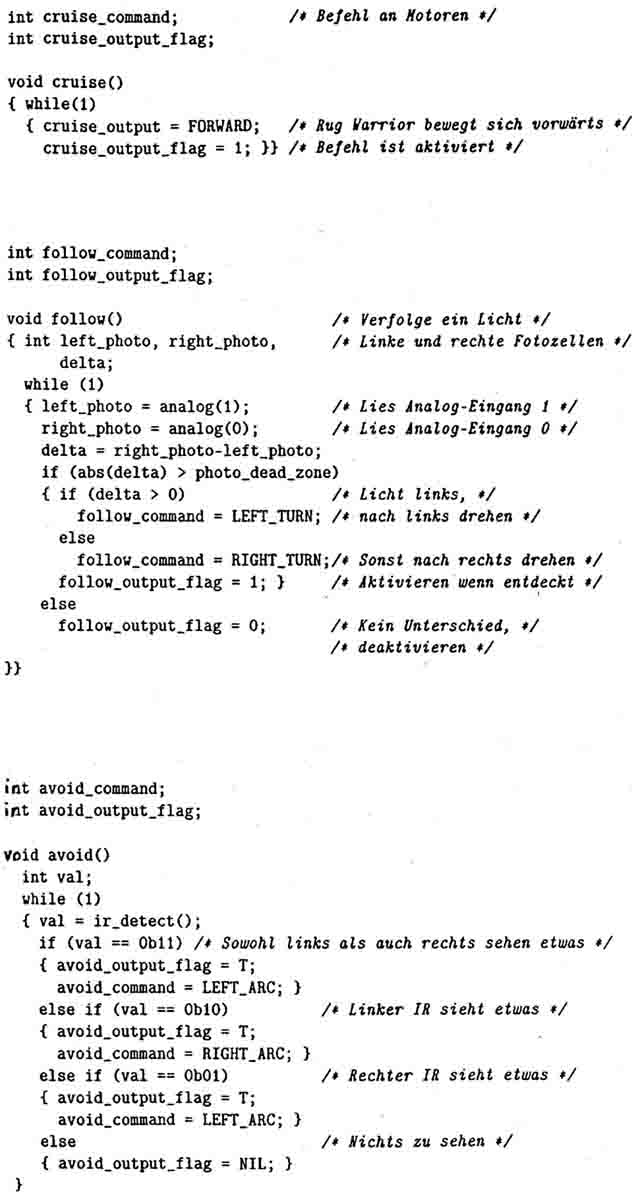
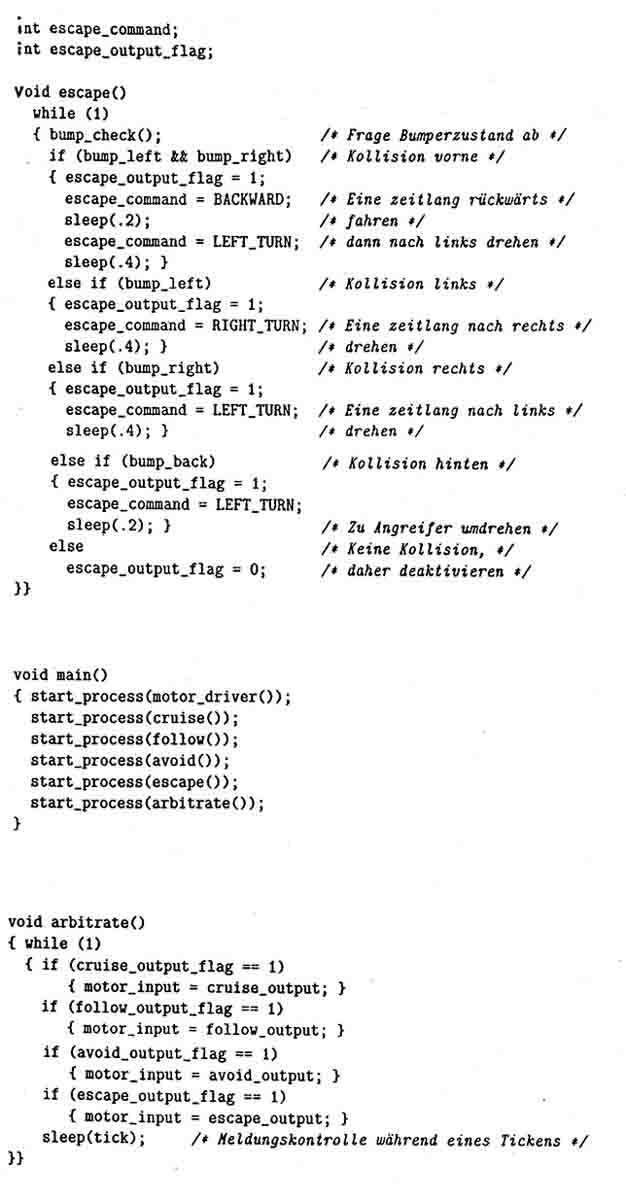
Das Verhalten Cruise in der Abbildung sorgt dafür das der Roboter immer in Bewegung bleibt. Follow bewirkt, daß bei einer Helligkeitsdifferenz, die die beiden an der Front angebrachten Photozellen detektieren, sich der Roboter zu der Lichtquelle hindreht. Avoid hat dasselbe Verhalten wie im vorigen Beispiel. Escape überwacht die 3 Kollisionssenoren die um eine Stosstange (Bumper) angebracht sind. Bei einer Kollosion stellt Escape die Richtung des Hinernisses fest, setzt zurück und versucht auszuweichen.
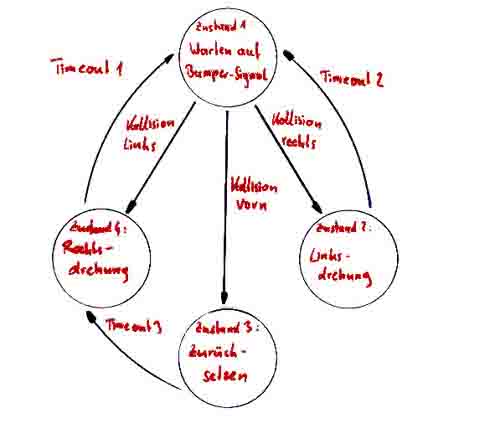
Diese Abbildung zeigt wie die Umsetzung des Verhaltens Escape mit einem DEA aussehen könnte.
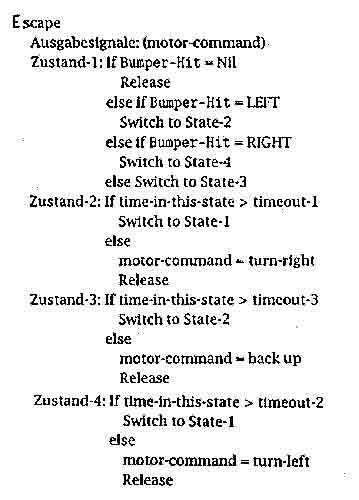
Die formelle Definition zu diesem Automaten würde wie in der Abbildung oben aussehen.
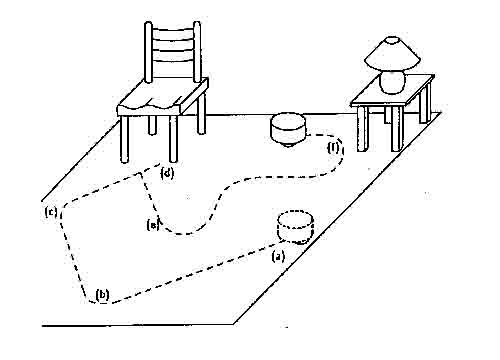
Am Punkt (a) wird der Roboter eingeschaltet. Da der Raum dunkel ist, sind die Signale an den beiden Photzellen gleich und das Follow verhalten gibt keine Befehle aus. Er bewegt sich durch Cruise geradeaus. An den Punkten (b) und (c) nehmen die Infrarotsensoren die Wand wahr und Avoid befiehlt Drehungen nach rechts. Da das Stuhlbein zu dünn ist, oder vielleicht die falsche Farbe hat, wird es von den Infrarotsensoren übersehen, und der Roboter kollidiert am Punkt (d). Diese Kollision aktiviert das Verhalten Escape, das den Roboter dazu veranlaßt, sich rückwärts zu bewegen und sich dann zu drehen. An Punkt (e) wird die Zimmerbeleuchtung eingeschaltet und der Roboter beginnt das Verhalten Follow auszuführen. Wenn der Roboter Punkt (f) zu Nahe kommt, sieht er die Lampe nicht mehr direkt und wendet sich einem helleren Punkt in seinem Gesichtsfeld zu.